So endlich konnten wir nun mein Display testen! Es ist das LCD-Modul Hyundai HP12542R-DYO, gekauft bei
Pollin. Ich hatte meine Schwierigkeiten an die Kontakte zu kommen, um das Display ansteuern zu können. Es ist ein Flex Flat Cable (FFC) mit 0,5 mm Abstand zwischen den Kontakten. Nach kurzer Suche mit den richtigen Suchwörtern habe ich auch passende Stecker gefunden. So kann man beispielsweise bei
http://www.rsonline.de/ nach FFC suchen. Nun wollte ich aber möglichst wenig Geld ausgeben. Dort verkaufen die die nur in 10er Tüten. Das brauche ich ja nicht.

Pollin bietet eine Ansteuerplatine für dieses Display an, bei der ein passender FFC -Stecker dabei ist. Für den habe ich mich nun entschieden. Da wir sowieso noch etwas von Pollin brauchten, hat sich das auch angeboten.
Man erhält eine schöne kleine Platine und die Bauelemente. In meiner Packung waren 2 FFC – Stecker, was mich natürlich noch mehr gefreut hat! Ob das aber so gehört, weiss ich nicht!
Beim Löten sollte man unbedingt die Anleitung beachten! Es wird darauf hingewiesen, den FFC – Stecker
RICHTIG herum ein zu löten!

Da muss ich wohl beim Blick auf die Abbildung geschielt haben. Denn ich gebe es zu, ich hatte es verdreht. Na ja, kommt vor. :)
Olaf hat mir dann aber mit Hilfe eines Heißluftföhns geholfen, den in SMD Bauform gefertigten Stecker wieder von der Platine zu lösen. Versuche mit Zinnsauger und Litze waren vergebens. Der Föhn hatte es richtig drauf.
So. Den leider schon ein bisschen gelittenen Stecker richtig herum wieder angelötet, fertig!
OK..., wir wären fertig gewesen, wenn wir nun noch ein passendes Anschlusskabel gehabt hätten. Wo soll man das als Student auch alles hernehmen?!?
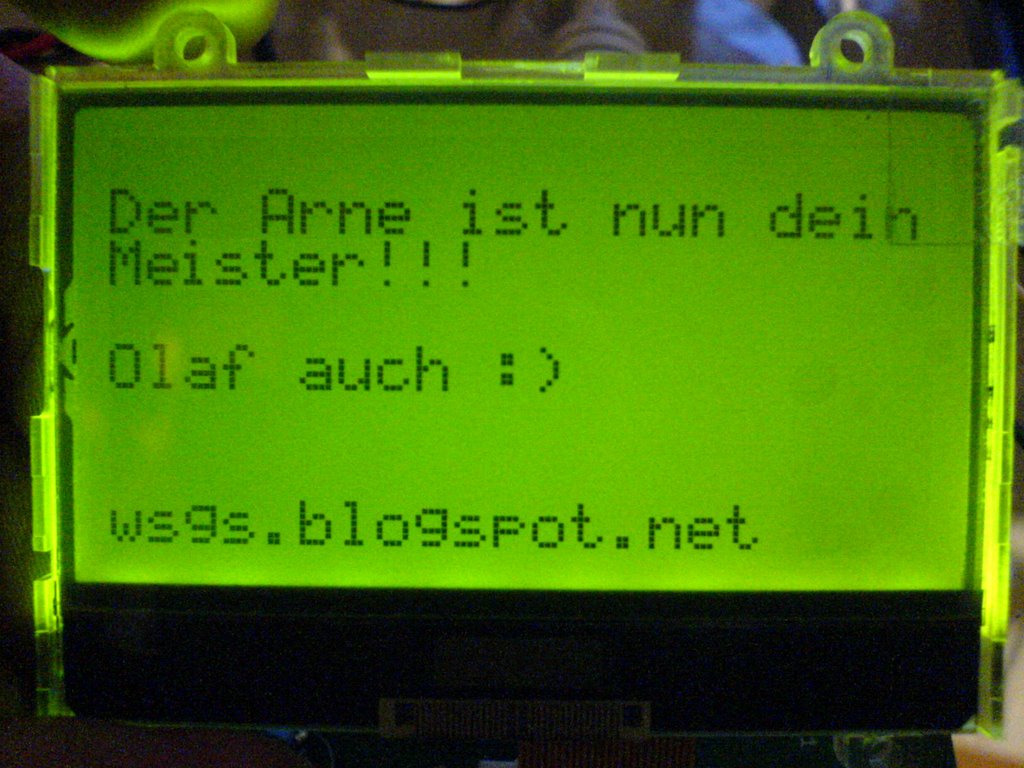
Zum Glück hatten wir noch einen richtigen Stecker (anstelle der Buchse) . Den haben wir kurzerhand auf der Rückseite angelötet (Wichtig! Spiegelverkehrt!) und ausprobiert. Es geht! Super!
Etwas schwere Geburt. Was bei uns zum Glück eher selten ist.
Meine ersten Eindrücke vom Display sind wirklich gut!
 So endlich konnten wir nun mein Display testen! Es ist das LCD-Modul Hyundai HP12542R-DYO, gekauft bei Pollin. Ich hatte meine Schwierigkeiten an die Kontakte zu kommen, um das Display ansteuern zu können. Es ist ein Flex Flat Cable (FFC) mit 0,5 mm Abstand zwischen den Kontakten. Nach kurzer Suche mit den richtigen Suchwörtern habe ich auch passende Stecker gefunden. So kann man beispielsweise bei http://www.rsonline.de/ nach FFC suchen. Nun wollte ich aber möglichst wenig Geld ausgeben. Dort verkaufen die die nur in 10er Tüten. Das brauche ich ja nicht.
So endlich konnten wir nun mein Display testen! Es ist das LCD-Modul Hyundai HP12542R-DYO, gekauft bei Pollin. Ich hatte meine Schwierigkeiten an die Kontakte zu kommen, um das Display ansteuern zu können. Es ist ein Flex Flat Cable (FFC) mit 0,5 mm Abstand zwischen den Kontakten. Nach kurzer Suche mit den richtigen Suchwörtern habe ich auch passende Stecker gefunden. So kann man beispielsweise bei http://www.rsonline.de/ nach FFC suchen. Nun wollte ich aber möglichst wenig Geld ausgeben. Dort verkaufen die die nur in 10er Tüten. Das brauche ich ja nicht.
 Pollin bietet eine Ansteuerplatine für dieses Display an, bei der ein passender FFC -Stecker dabei ist. Für den habe ich mich nun entschieden. Da wir sowieso noch etwas von Pollin brauchten, hat sich das auch angeboten.
Man erhält eine schöne kleine Platine und die Bauelemente. In meiner Packung waren 2 FFC – Stecker, was mich natürlich noch mehr gefreut hat! Ob das aber so gehört, weiss ich nicht!
Beim Löten sollte man unbedingt die Anleitung beachten! Es wird darauf hingewiesen, den FFC – Stecker RICHTIG herum ein zu löten!
Pollin bietet eine Ansteuerplatine für dieses Display an, bei der ein passender FFC -Stecker dabei ist. Für den habe ich mich nun entschieden. Da wir sowieso noch etwas von Pollin brauchten, hat sich das auch angeboten.
Man erhält eine schöne kleine Platine und die Bauelemente. In meiner Packung waren 2 FFC – Stecker, was mich natürlich noch mehr gefreut hat! Ob das aber so gehört, weiss ich nicht!
Beim Löten sollte man unbedingt die Anleitung beachten! Es wird darauf hingewiesen, den FFC – Stecker RICHTIG herum ein zu löten!
 Da muss ich wohl beim Blick auf die Abbildung geschielt haben. Denn ich gebe es zu, ich hatte es verdreht. Na ja, kommt vor. :)
Olaf hat mir dann aber mit Hilfe eines Heißluftföhns geholfen, den in SMD Bauform gefertigten Stecker wieder von der Platine zu lösen. Versuche mit Zinnsauger und Litze waren vergebens. Der Föhn hatte es richtig drauf.
So. Den leider schon ein bisschen gelittenen Stecker richtig herum wieder angelötet, fertig!
OK..., wir wären fertig gewesen, wenn wir nun noch ein passendes Anschlusskabel gehabt hätten. Wo soll man das als Student auch alles hernehmen?!?
Da muss ich wohl beim Blick auf die Abbildung geschielt haben. Denn ich gebe es zu, ich hatte es verdreht. Na ja, kommt vor. :)
Olaf hat mir dann aber mit Hilfe eines Heißluftföhns geholfen, den in SMD Bauform gefertigten Stecker wieder von der Platine zu lösen. Versuche mit Zinnsauger und Litze waren vergebens. Der Föhn hatte es richtig drauf.
So. Den leider schon ein bisschen gelittenen Stecker richtig herum wieder angelötet, fertig!
OK..., wir wären fertig gewesen, wenn wir nun noch ein passendes Anschlusskabel gehabt hätten. Wo soll man das als Student auch alles hernehmen?!?
 Zum Glück hatten wir noch einen richtigen Stecker (anstelle der Buchse) . Den haben wir kurzerhand auf der Rückseite angelötet (Wichtig! Spiegelverkehrt!) und ausprobiert. Es geht! Super!
Etwas schwere Geburt. Was bei uns zum Glück eher selten ist.
Meine ersten Eindrücke vom Display sind wirklich gut!
Zum Glück hatten wir noch einen richtigen Stecker (anstelle der Buchse) . Den haben wir kurzerhand auf der Rückseite angelötet (Wichtig! Spiegelverkehrt!) und ausprobiert. Es geht! Super!
Etwas schwere Geburt. Was bei uns zum Glück eher selten ist.
Meine ersten Eindrücke vom Display sind wirklich gut!